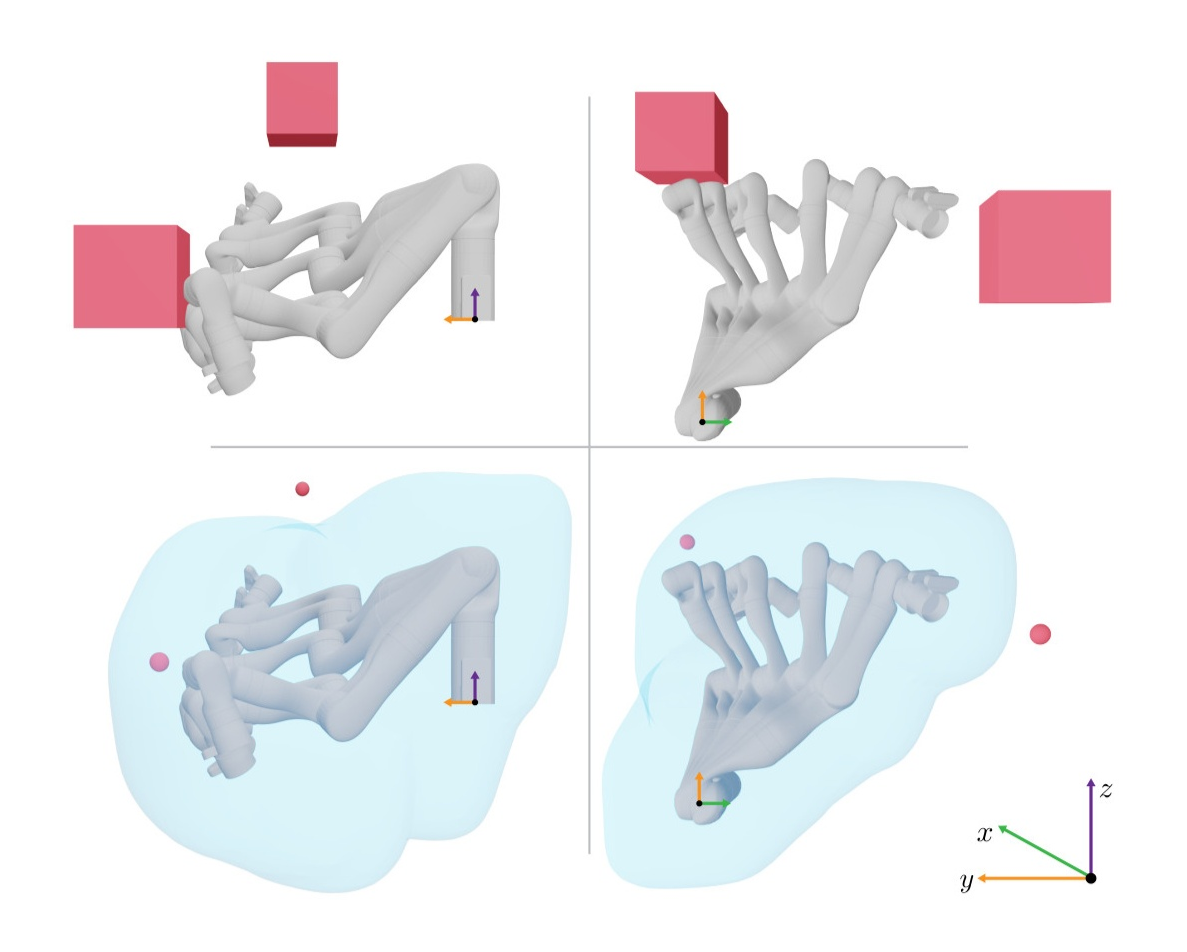
Conformalized Reachable Sets for Obstacle Avoidance With Spheres
project page • paper • code

kwonys [at] seas [dot] upenn [dot] edu
I'm a Ph.D. student at the University of Pennsylvania, advised by Prof. Rachel Holladay. Previously, I received my MS at the University of Michigan, advised by Prof. Ram Vasudevan.
My research aims to develop reliable algorithms that enable robots to perform a wide range of manipulation tasks. To achieve this, I focus on designing efficient representations of world models and developing robust planners/policies that account for the uncertainty inherent in these world models.
Conformalized Reachable Sets for Obstacle Avoidance With Spheres
project page • paper • code
Reachability-based Trajectory Design with Neural Implicit Safety Constraints
project page • paper • code
ZONOPY: Zonotopes in Python
A Python library for handling various continuous sets (e.g., intervals, zonotopes, and polynomial zonotopes) to compute reachable sets in robotic arm kinematics and dynamics, with support for parallel computation.
▸ zonopy : code • documentationdoc.
▸ zonopy-robots : code • documentationdoc.